Рівномірний прямолінійний рух — це такий механічний рух, під час тіло за будь-які рівні інтервали часу здійснює однакові переміщення.
Із означення рівномірного прямолінійного руху випливас:
Векторну фізичну величину, яка дорівнює відношенню переміщення s до інтервалу часу t, за який це переміщення відбулося, називають швидкістю рівномірного прямолінійного руху тіла:
Напрямок вектора швидкості руху збігається з напрямком переміщення тіла, а модуль і проекцію швидкості визначають за формулами:
Одиниця швидкості руху в СІ — метр за секунду:
Із формули для визначення швидкості руху тіла можна знайти переміщення тіла за будь-який інтервал часу:
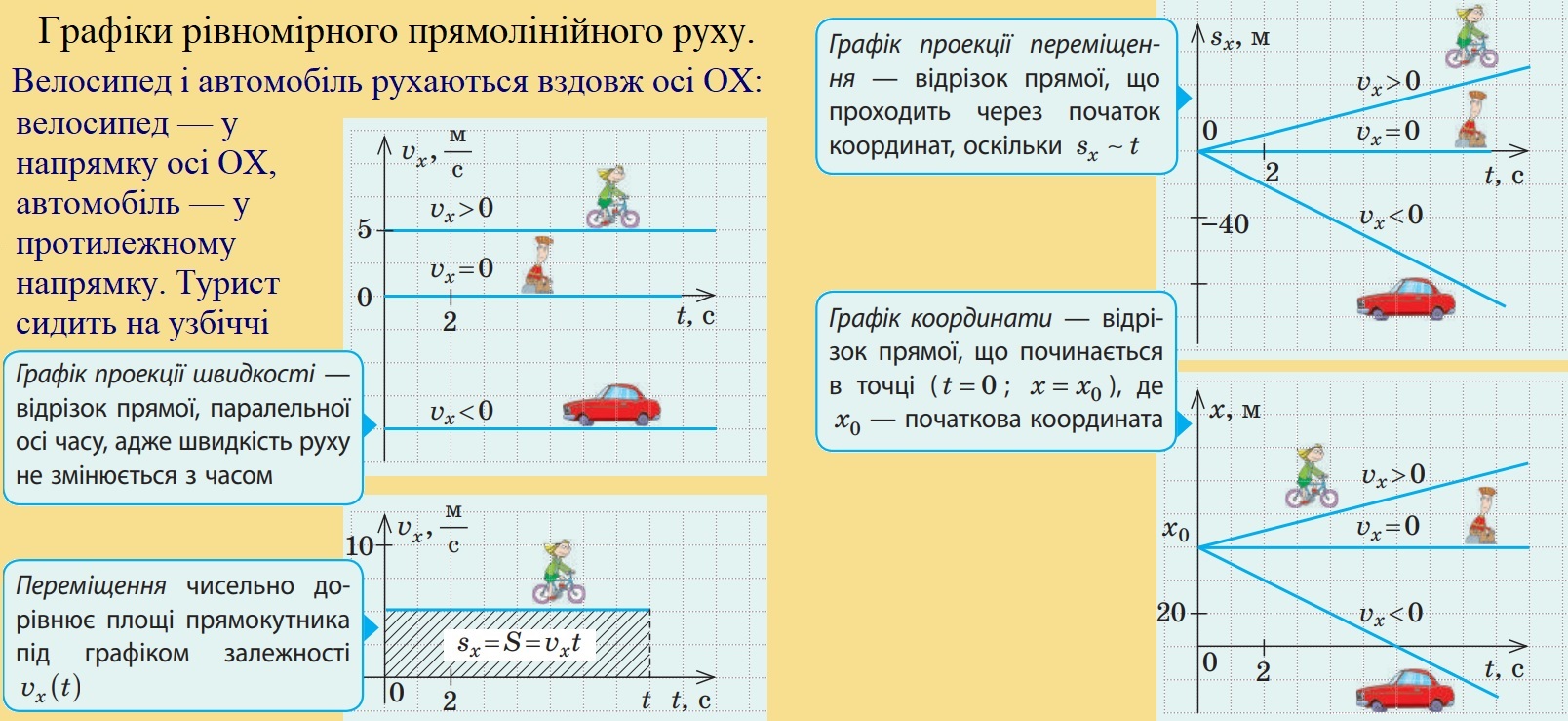
Останню формулу будемо записувати для проекцій: sx = vxt або для модулів: s = vt. Оскільки в даному випадку швидкість руху тіла не змінюється з часом, то переміщення, яке здійснює тіло, прямо пропорційне часу:
Для розв’язання основної задачі механіки — визначення механічного стану тіла в будь-який момент часу — запишемо рівняння координати. Оскільки х = х0 + sx , а sx = vxt , для рівномірного прямолінійного руху рівняння координати має вигляд:
де х0 — початкова координата; vx — проекція швидкості*; t — час спостереження.
* Тут і далі мається на увазі проекція швидкості на вісь, яку зазначено в нижньому індексі.
Для описання руху зручно використовувати графіки — вони так само повно описують рух тіл, як і відповідні формули або словесний опис.
Нерівномірний рух характерізується середньою шляховою швидкістю, середньою векторною швидкістю, миттєвою швидкістю.
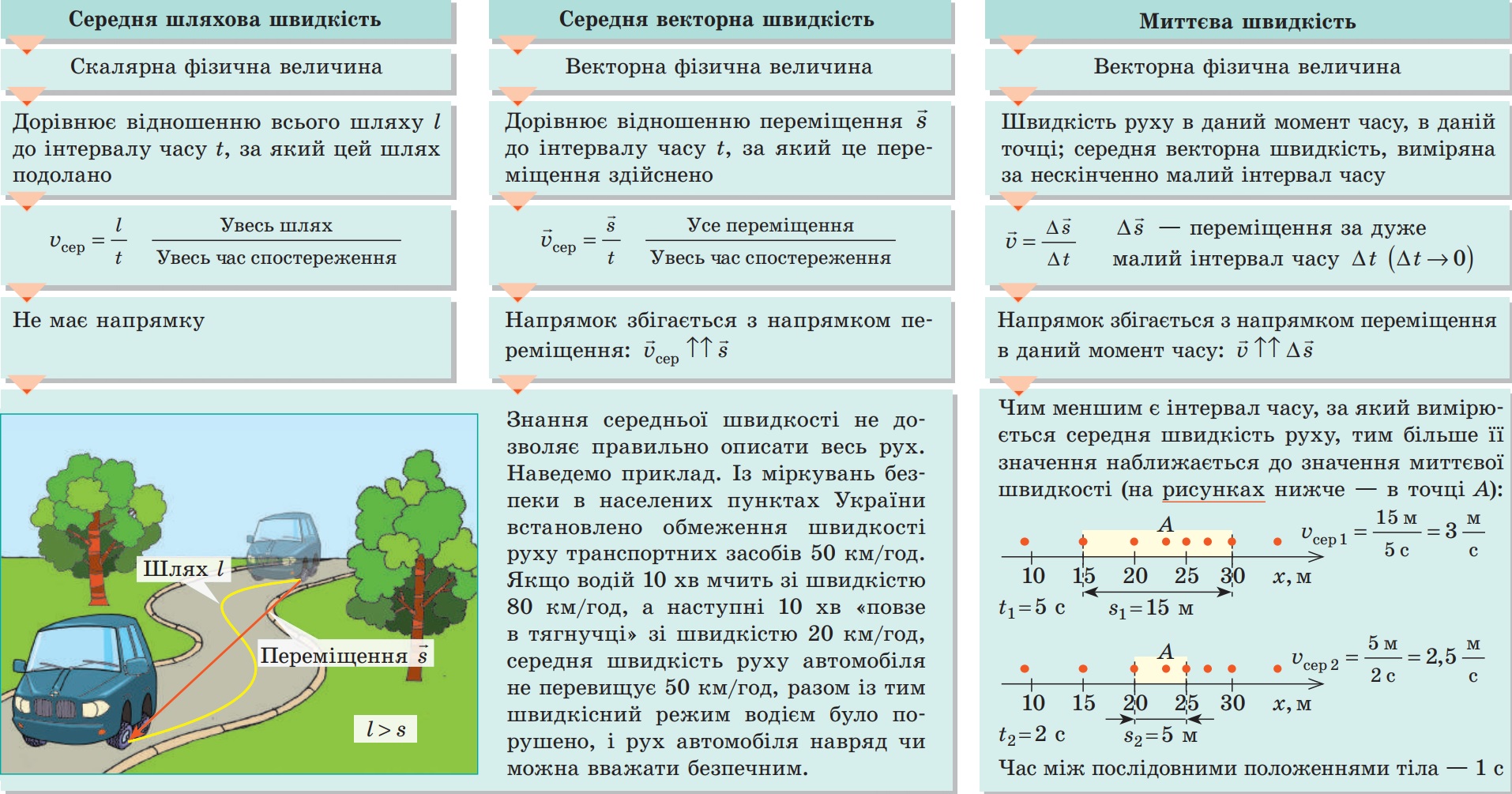
Далі, говорячи про швидкість руху тіла, матимемо на увазі його миттєву швидкість.
Під час прямолінійного рівномірного руху миттєва швидкість увесь час залишається незмінною та збігається із середньою векторною швидкістю руху тіла. У будь-якому іншому випадку миттєва швидкість руху тіла змінюється: за напрямком — під час криволінійного рівномірного руху; за значенням, інколи за напрямком (напрямок може змінюватися на протилежний) — під час прямолінійного нерівномірного руху; за напрямком і значенням водночас під час криволінійного нерівномірного руху.
Розглянемо рух тіла в різних системах відліку (СВ).
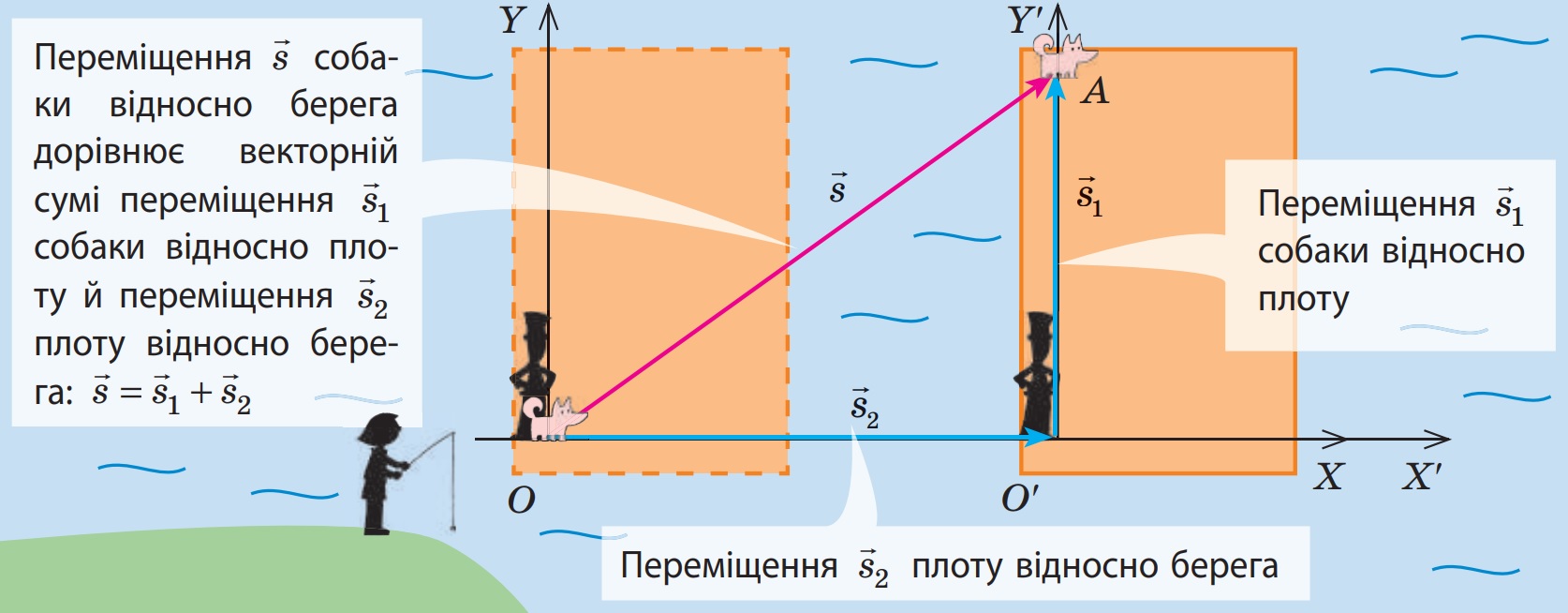
Переміщення s1, яке здійснив собака відносно плоту (і яке виміряв спостерігач), приблизно дорівнює за модулем ширині плоту і напрямлене перпендикулярно до течії річки.
Переміщення s, здійснене собакою відносно берега (і яке виміряла рибалка), дорівнює за модулем довжині відрізка ОА і напрямлене під певним кутом до течії річки.
Власне пліт за цей час змістився за течією і здійснив пере міщення s2 відносно берега.
Із рисунка бачимо: s = s2 + s1. Пов’язана з берегом система координат XOY — нерухома систему відліку. Пов’язана із плотом система координат X'O'Y' — рухома систему відліку.
Переміщення s тіла в нерухомій системі відліку дорівнює геометричній сумі переміщення s1 тіла в рухомій системі відліку та переміщення s2 рухомої системи відліку відносно нерухомої.
Поділивши обидві частини рівняння на час руху s/t = s1/t + s2/t і врахувавши, що s/t = v, отримаємо
Швидкість v руху тіла в нерухомій системі відліку дорівнює геометричній сумі швидкості v1 руху тіла в рухомій системі відліку та швидкості v2 руху рухомої системи відліку відносно нерухомої.
Зверніть увагу! Оскільки рух і спокій є відносними, то в наведеному вище прикладі як нерухому СВ можна було обрати й СВ, пов’язану з плотом. У такому разі СВ, пов’язана з берегом, була б рухомою, а напрямок її руху був би протилежним напрямку течії.
* Розв'язування задачі на цій сторінці передбачає використання мультимедійної дошки. В підручнику розв'язування задачі на сторінках 30, 31.
Задача. Рибалка перепливає річку на човні, утримуючи його перпендикулярно до напрямку течії. Швидкість v1 руху човна відносно води — 4 м/с, швидкість v2 течії річки — 3 м/с, ширина l річки — 400 м. Визначте: 1) за який час t човен перепливе річку та за який час t1 човен переплив би річку, якби не було течії; 2) модуль переміщення s і модуль швидкості v руху човна відносно берега; 3) на якій відстані s2 униз за течією від вихідної точки човен досягне протилежного берега.
Аналіз фізичної проблеми. Як нерухому візьмемо СВ, пов’язану із Землею, як рухому — СВ, пов’язану з водою. Виконаємо пояснювальний рисунок, на якому зобразимо вектори швидкості: руху човна відносно берега (v), руху човна відносно води (v1), течії річки (v2).
